Klip 4-Wheel Walker

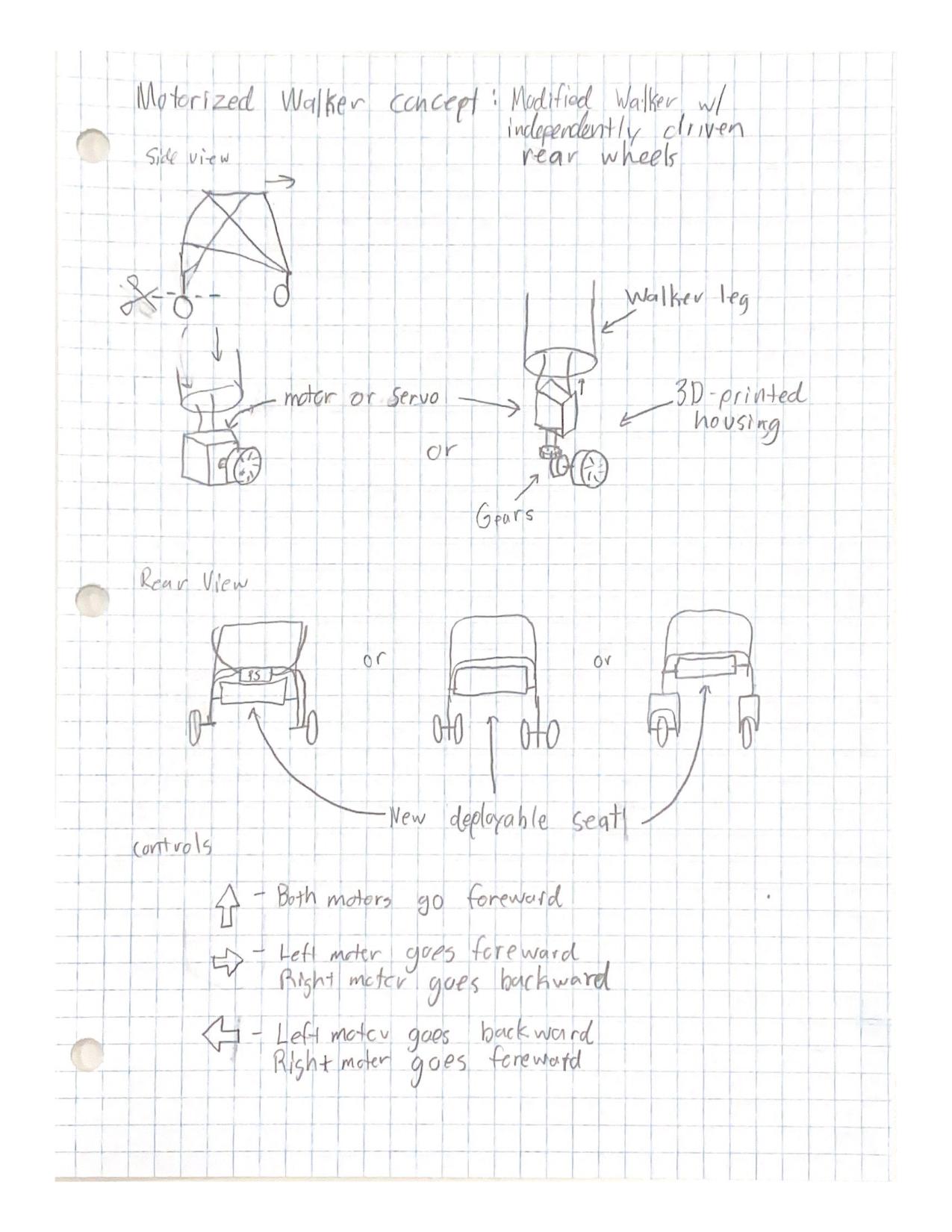
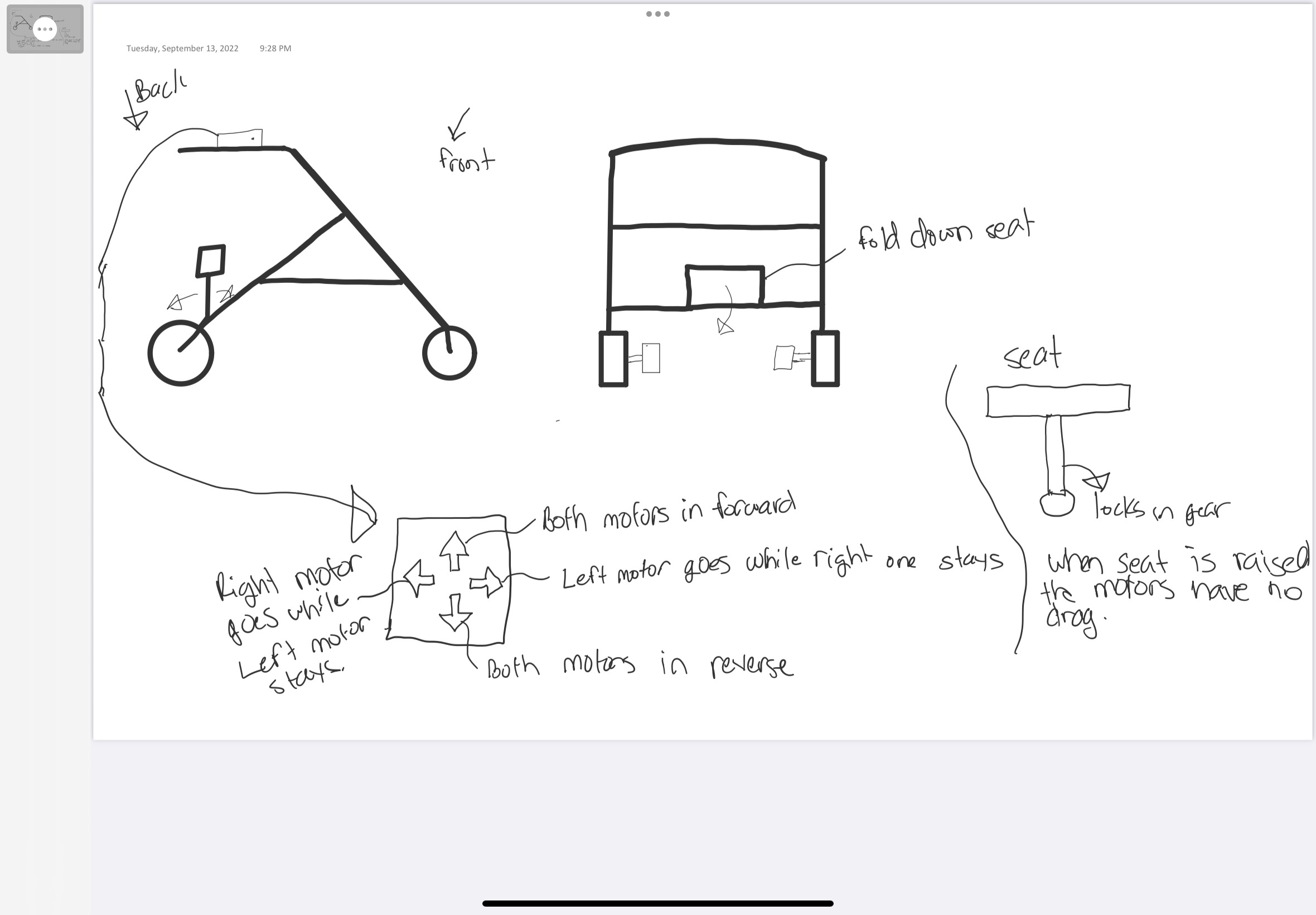
When we were trying to figure out some ideas on how to design this walker we went through some patents of motorized walkers that are already made. Also, we were able to meet the child and see his walker and how it is used to know how we can modify it with designs that have already been made to best suit him.















{kind=link}