Our fabrication process had several aspects: Printing out the necessary plates, wiring up the motor for the raising process, creating a way to store the electrical components, and then assembling the entire project.
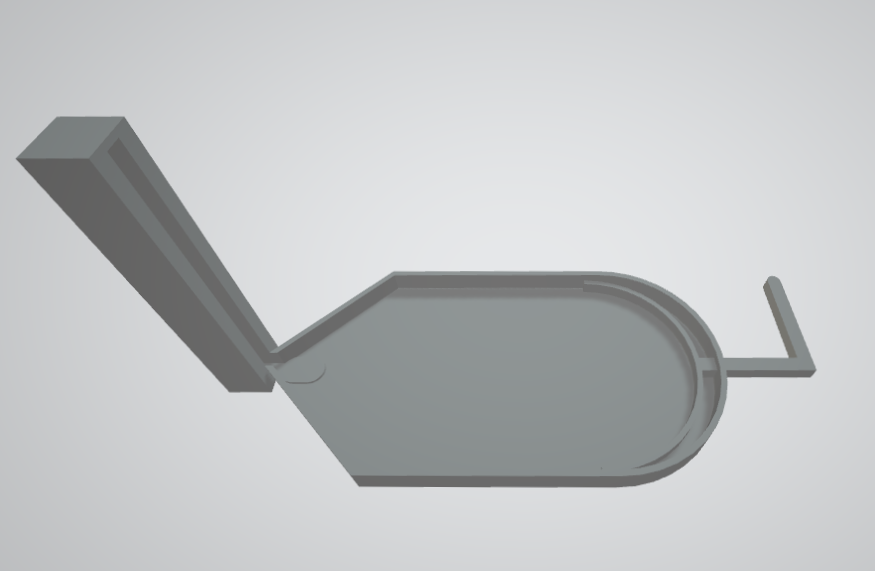
Printing out the plates was the longest aspect of the process. Each print took 12-18 hours but occurred without issue. The food tray, lid, and pusher were at first printed at a 75% scale as a proof of concept. After this, the tray and pusher were printed at a full scale. Since setting food on the filament isn’t the safest choice for a feeding station, we created a mold from the 3D model and poured in a non-toxic epoxy, resulting in a translucent cream colored feeding tray.
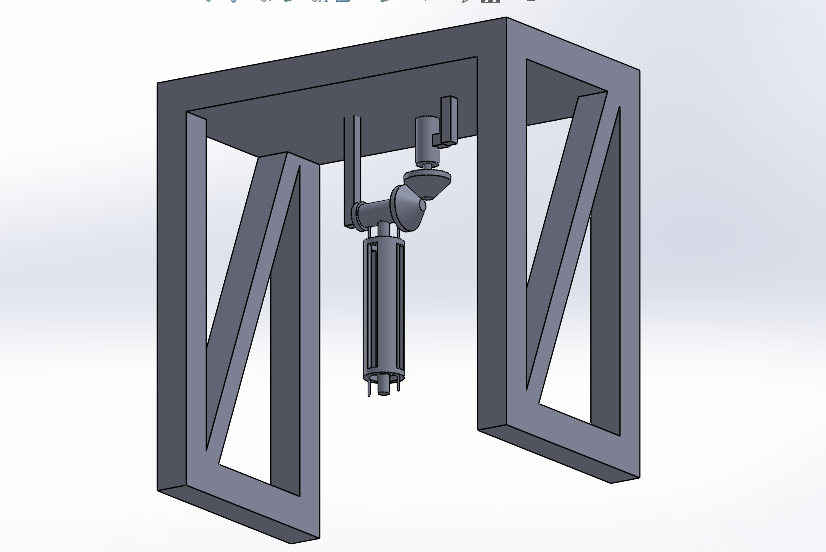
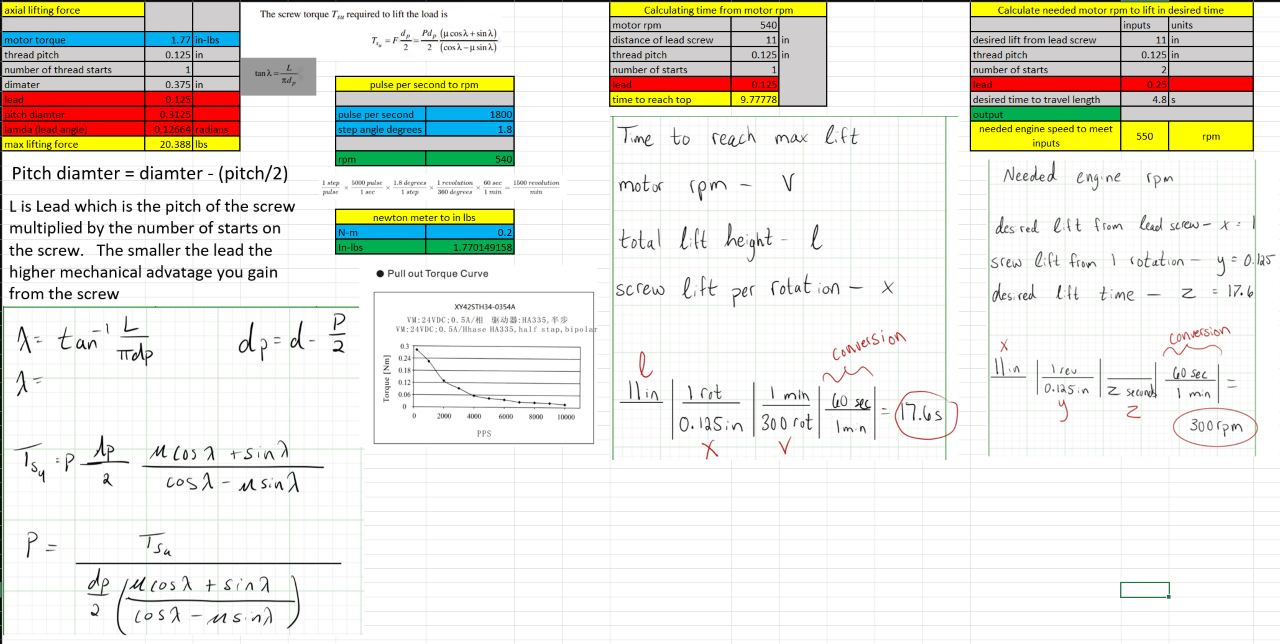
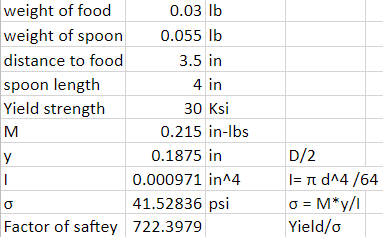
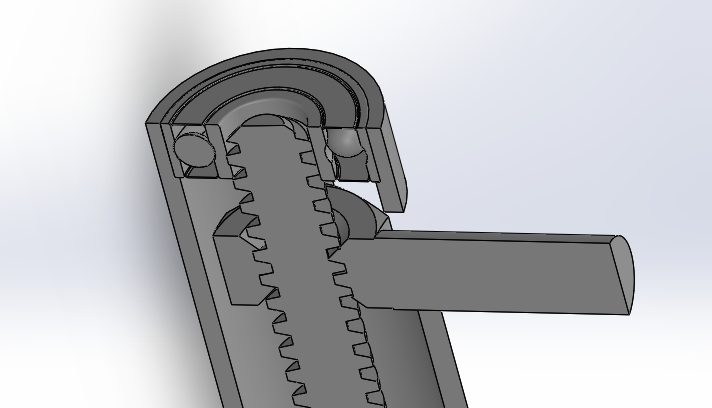
The electrical components required an Arduino and motor control board to power the stepper motor. Two buttons for raising and lowering the spoon were programmed in, as well as a safety implementation to prevent changing the direction mid cycle. A limit switch is placed at the boundary of where the spoon needs to move to stop it from moving too far. The stepper motor was connected to a lead screw, and a bearing placed on the screw to house the spoon. The screw is set inside of a guide to move the spoon to the side of the station as it raises. The end result of this is a homing, raising, and lowering function to the spoon.
To house the electrical components, a wooden frame was constructed using the laser cutter on a thin sheet of plywood. The pieces were then assembled into a box. The box was then stained and holes for the buttons, power switch, motor, and power cord were drilled in. Feet were attached to the bottom to prevent the wood from scratching whatever surface it’s set on.
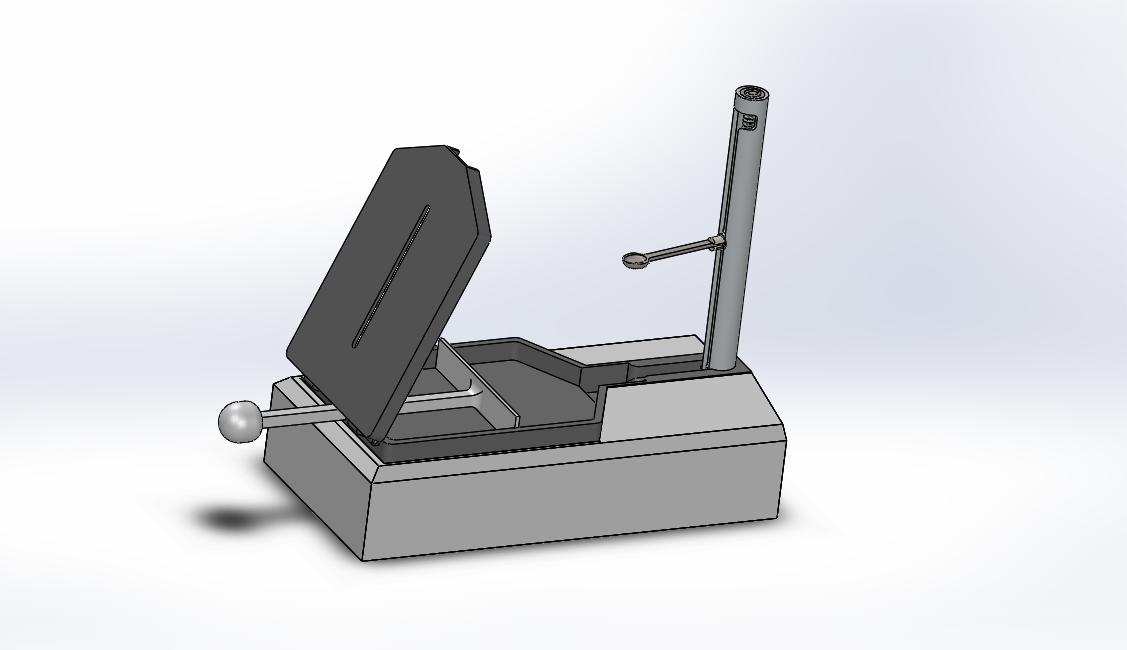
After the box was made, all electronics were set inside the box. The base plates, having been printed to accommodate the buttons and motor, were set on top of the box and the food tray was placed on last. The tray can be removed for cleaning. The result of this assembly is a station that can have food manually pushed into the spoon and a button pressed to raise the spoon, eat, and then lower the spoon back.


































{kind=link}