Spring 2022 Project 10b: Advanced Rowing Bike (P2)
Abstract
We were given the task of fixing an existing design from a previous group, along with developing another bike that fixes some of the problems of the original.
Problem Statement
We were given the task of taking an existing design of a rowing bike and improving on it. The bike is designed for the special needs department at a local high school, specifically for those kids who are disabled and lack the control over their lower body. When talking to the special needs counselor at the school, she mentioned the bike needed to be able to fit multiple body types and weights, along with having a low input of effort to move the bike.
Design Specifications
The bike needs to be propelled by a rowing motion at the handlebars, and it has been requested that we make a pushing motion propel the bike forward as well. Along with this improvement, there needs to be some form of reverse or neutral gear in case the bike gets stuck and cannot roll forward anymore. Most importantly: the inner mechanisms on the bike need to be easily accessible and easily maintained by the councilor.
Background Research
We have the original bike that was developed from previous teams which is a one-directional row with multiple gearsets. We were able to take a lot of information from the design of this bike for our new one while also improving upon the old bike as well.
Concept Design 1
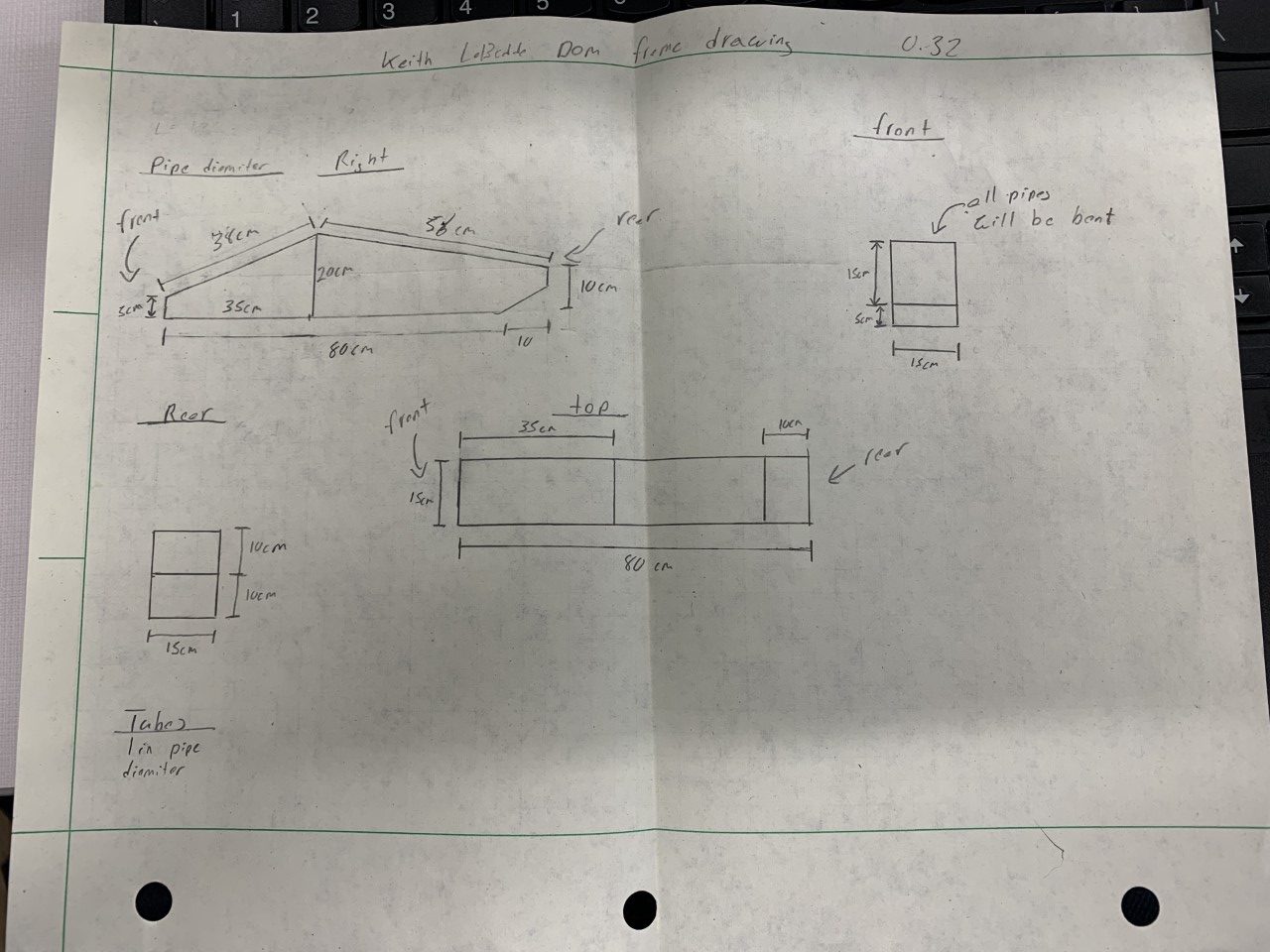
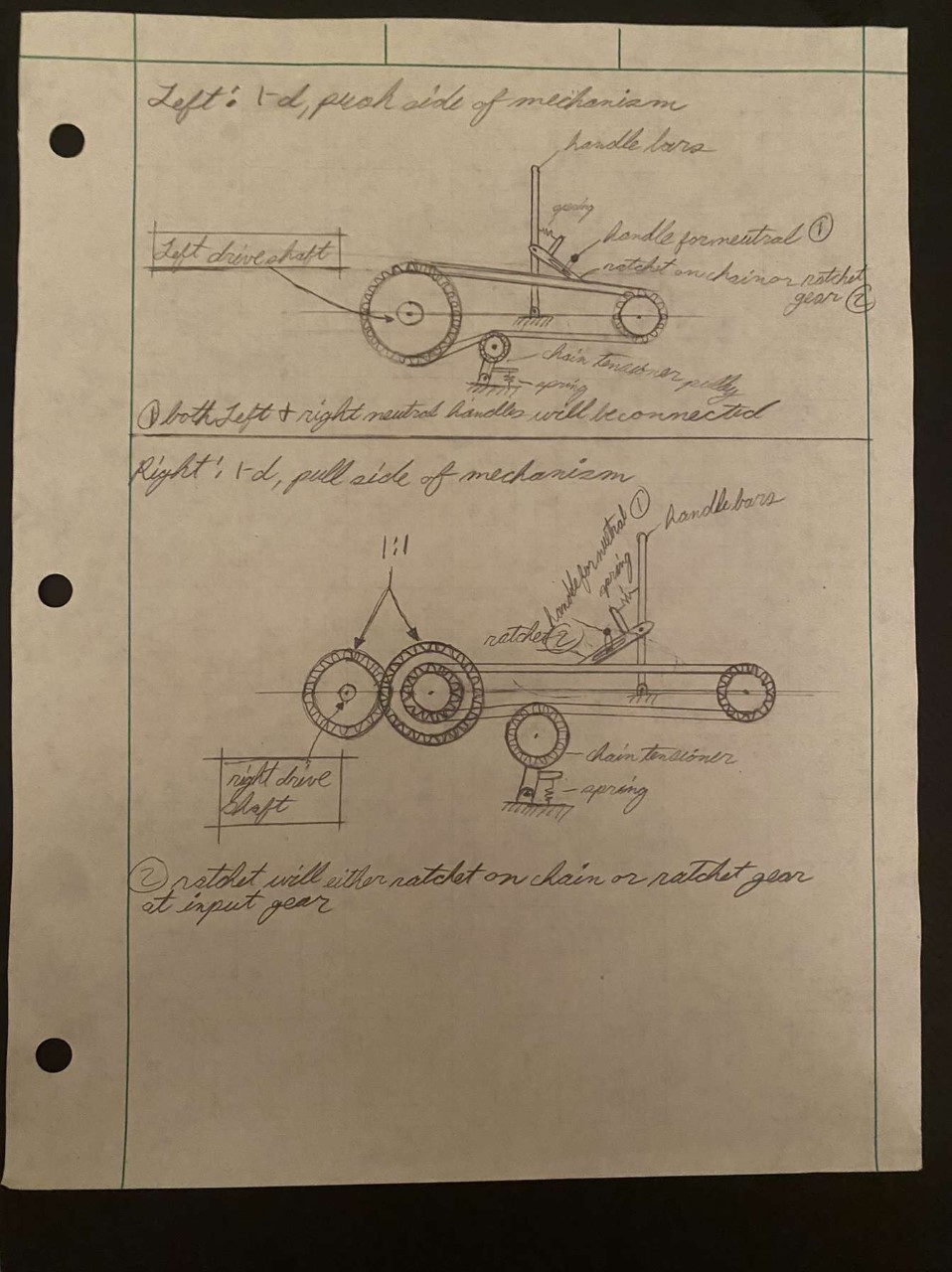
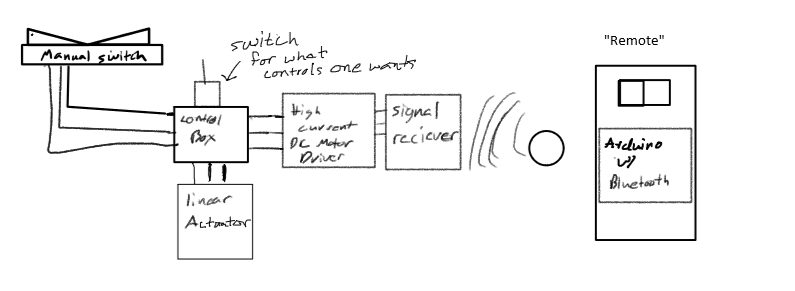
Driveline uses two separate chain drives and disengaging/reversible ratchets. Using the disengaging/reversible ratchets allows for the therapist to easily pull rider and bike away from an obstacle the rider may run into. The challenge with this design is finding a way to make the entire mechanism whispering silent with little to no vibrations. The second picture is a possible design for the frame, this frame is a revision of the original with some slight improvements over the original design. The third image is a possible design for the electric power steering control, unlike the original this design includes an external remote making it easier for the teacher to control the trike without impeding the child.
Concept Design 3
Overview of Selected Design
We split into three separate groups, each assigned to a specific area of the bike.
The chassis/frame group consisting of Keith LaBudde, Kyle Carr, and Abanoub Aziz ended up selecting the below frame design for the bike. After running multiple SolidWorks simulations for stress and deflection we ended up selecting 4130 stainless steel tubes with 1 in od and .065 in wall thickness for the frame.
Kyler Samples, Sam Speights, and Alexander Smith all chose to be on the gearbox/drivetrain group and work on developing a method to propel the bike using only hand motion. They selected a pully design to reduce noise and weight compared to the gearset in the previous bike, and with the use of one way bearings they were able to develop omnidirectional rowing to power this bike.
Logan Brock, Thomas Retallack, and Keegan Knox were in charge of the steering and braking systems. For steering, an electronic linear actuator was selected which used a wireless remote to operate and turn the front wheels. For braking, a standard bicycle brake rotor and caliper setup was used on the back wheels.
Engineering Analysis 1
The first engineering analysis was over the the strength of the frame that we developed in SolidWorks. In SolidWorks there is a built in simulation system that allows you to simulate different things like load or thermal stress on a part to se how it would deflect, weaken, ect. We used the load simulation to develop the frame and select our working material based on the loads we would be working with. As seen in the picture below we chose the ends of the axels to be our fixed points, and applied a load of 800lbs distributed evenly on the seat of the bike. Even with this load, more then the bike will ever see, the max deflection was under 2mm at the points seen in red. These areas are already within tolerance but with the addition of the gearbox housing acting as a stressed member in this area, deflection under load will negligible providing this frame with a high factor of safety.