Five year-old boy needs more sensory input. Ideally this would come from jumping, but in a prescribed manner. The mother of the child wishes for something he could jump on with lots of resistance.
(More resistance than found in a normal commercially available trampoline.)
Adams, Phillip | Herburger, Benjamin | Hite, Morris | Jaeger, Stephen | Neuendorf, Tim
Problem Statement
The child is a five year-old boy with a severe form of autism. He was typical until he was 18 months old when his vocabulary started to decline and he lost words and other skills. He was diagnosed at 2 years 8 months when his case became more severe. He is now non-verbal, has sensory issues, and a loss of motor skills.
He is in constant search of sensory input from his environment. He gets this from jumping up and down everywhere he goes. When he is at home he has a small exercise trampoline that he spends most of his time on.
His mother’s biggest complaints are that his trampolines break too often and that he isn’t getting enough of the sensory input he is looking for.
Design Specifications
No matter the design chosen, the design can’t have a footprint larger then a large in home trampoline.(No larger then 44 inches in diameter)
Must be designed in a way so that even without supervision, there will be very little risk to the child.
Any design should increase either the lifespan of the current trampolines the child uses, or replace it with a higher quality trampoline.
The mother request that her child get my sensory input from using the trampoline.
Any design should be easily adjustable by either parent so that they can change how much input the child receives.
Background Research
The group started out with the idea of making something that would offer more sensory input for clay, but also to increase the life expectancy of any trampoline it was attached to.
The designs the team thought of were dampening devices that would absorb some of the impact lowering the amount that the trampoline adsorbed and thus increasing its life expectancy.
All the designs were going to be placed under the standard store bought trampolines.
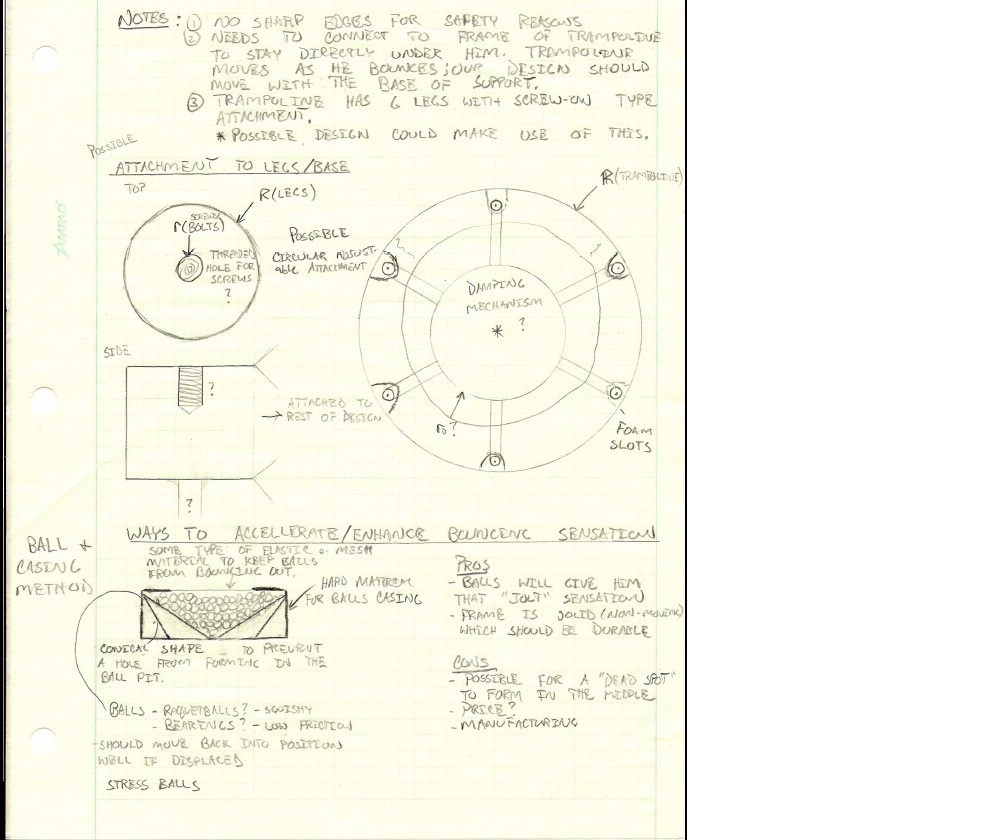
Concept Design 1
The team made the first design for a conical design in which exercise balls or some type of soft balls would be used to absorb impact. He would jump and before the trampoline would reach its normal displacement, the cloth of the trampoline would hit on the balls sending some of the energy of the trampoline into kinetic energy of the balls bouncing around.
Strengths and Advantages of Design Idea 1
The design allowed for the adjustment of the number of balls allowing to change how much energy would be adsorbed from the trampoline as clay bounced.
Due to the conical shape the balls would keep rolling back to the center of the ball pool after each bounce.
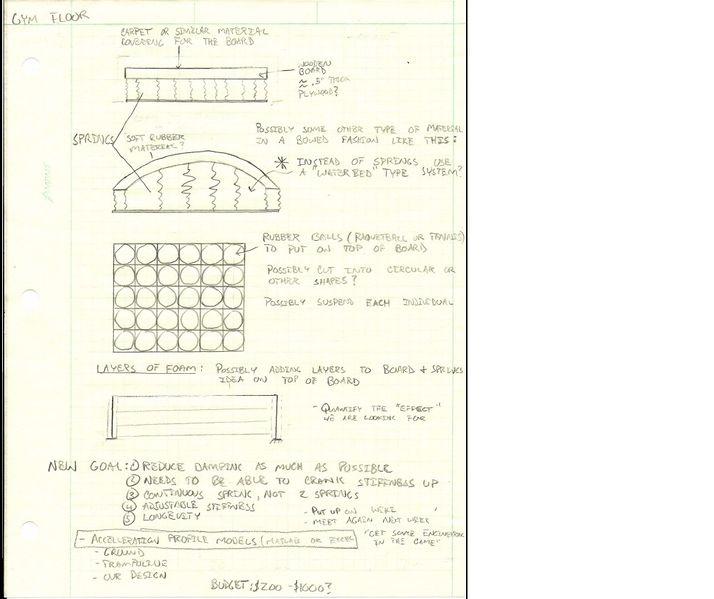
Concept Design 2
The second design of the group was to add a second stage of springs with a firm landing pad so the child would receive more sensory input, but would also increase the total life expectancy of the trampolines by lower the peak amount of force the springs caused on the mesh cloth that he jumped on as these where the points of failure for the last 6 trampolines he used.
After coming up with this idea the time looked at possibly using different tops for the spring bed. A curved top and finally a panel of half tennis balls was thought of for offering more sensory input compared to the flat plate top.
The group then looked at replacing the springs with hard foam mats that would be easier to replace as they wore out compared to the springs.
Strengths and Advantages of Design Idea 2
The physics were far easier to model then the large group of individual balls from the ball pit of idea 1.
The top could be changeable to allow for a wider variety of sensory inputs from different designs.
The lengths of springs could be changed and
allow the mother to change how much dampening it would cause.
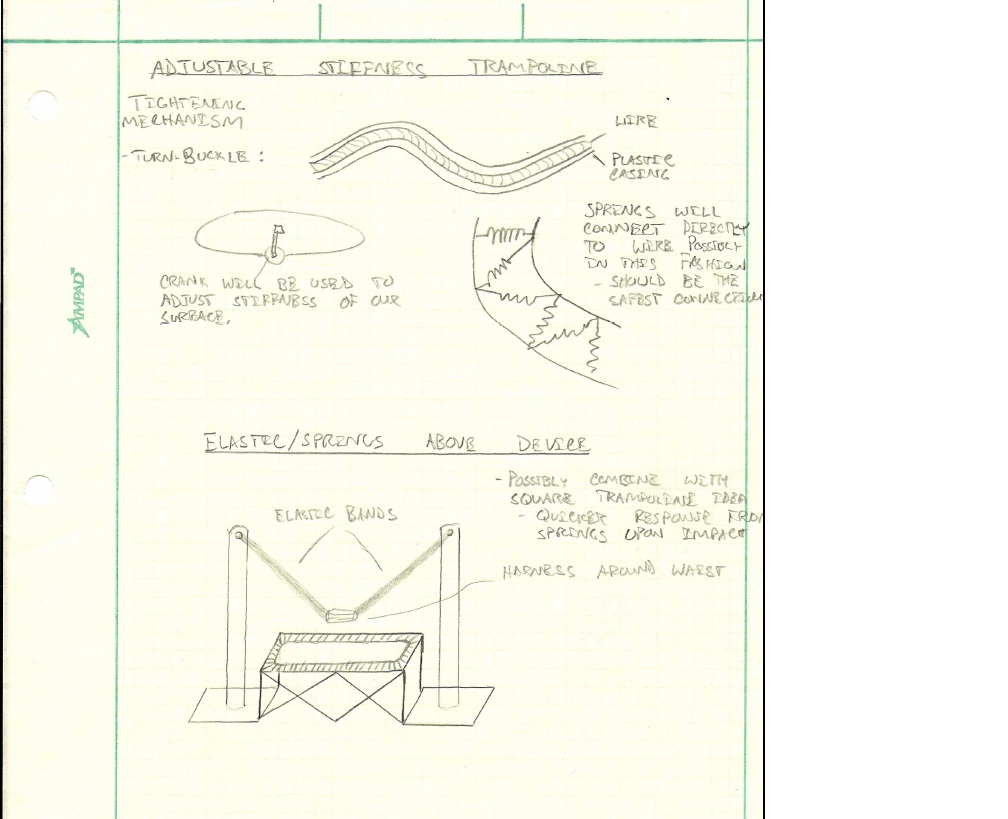
Concept Design 3
The final design was based on the bouncy rides found at some large malls and fairs.
Large bouncy cord(s) are attached to 2 separate poles and connected to a harness.
This would allow more energy to be stored in each bounce and help keep him in the center of his outdoor trampoline where he could get the greatest highlight and impacts.
Different cords could be used to change the spring coefficient of the system to change how much energy can be stored and how much impact the boy can reach at once.
Strengths and Advantages of Design idea 3
This design would offer the largest impacts of the 3 designs.
The design offers the added safety of helping to keep the child in the center of the trampoline, thus reducing the chances of him injuring himself.
The bands could be changed out with stronger or weaker ones depending if the child is receiving to much or little impact when he lands on the trampoline mat.
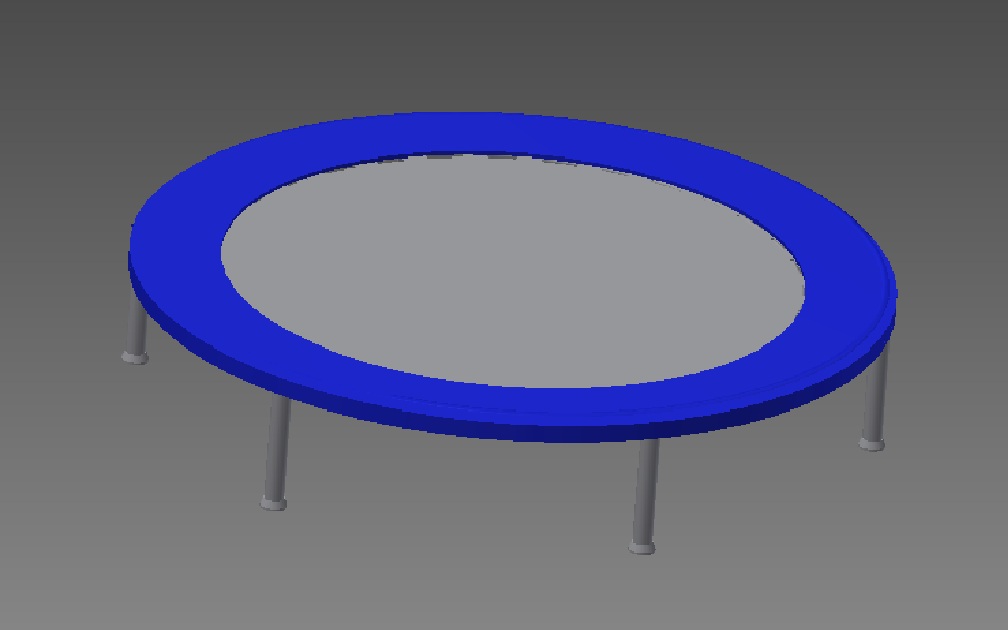
Overview of Selected Design
The analysis of the design started out with highly simplified models that didn’t give accurate results. With each analysis the models were refined and more detailed resulting in very accurate models that helped in the choices for the final designs.
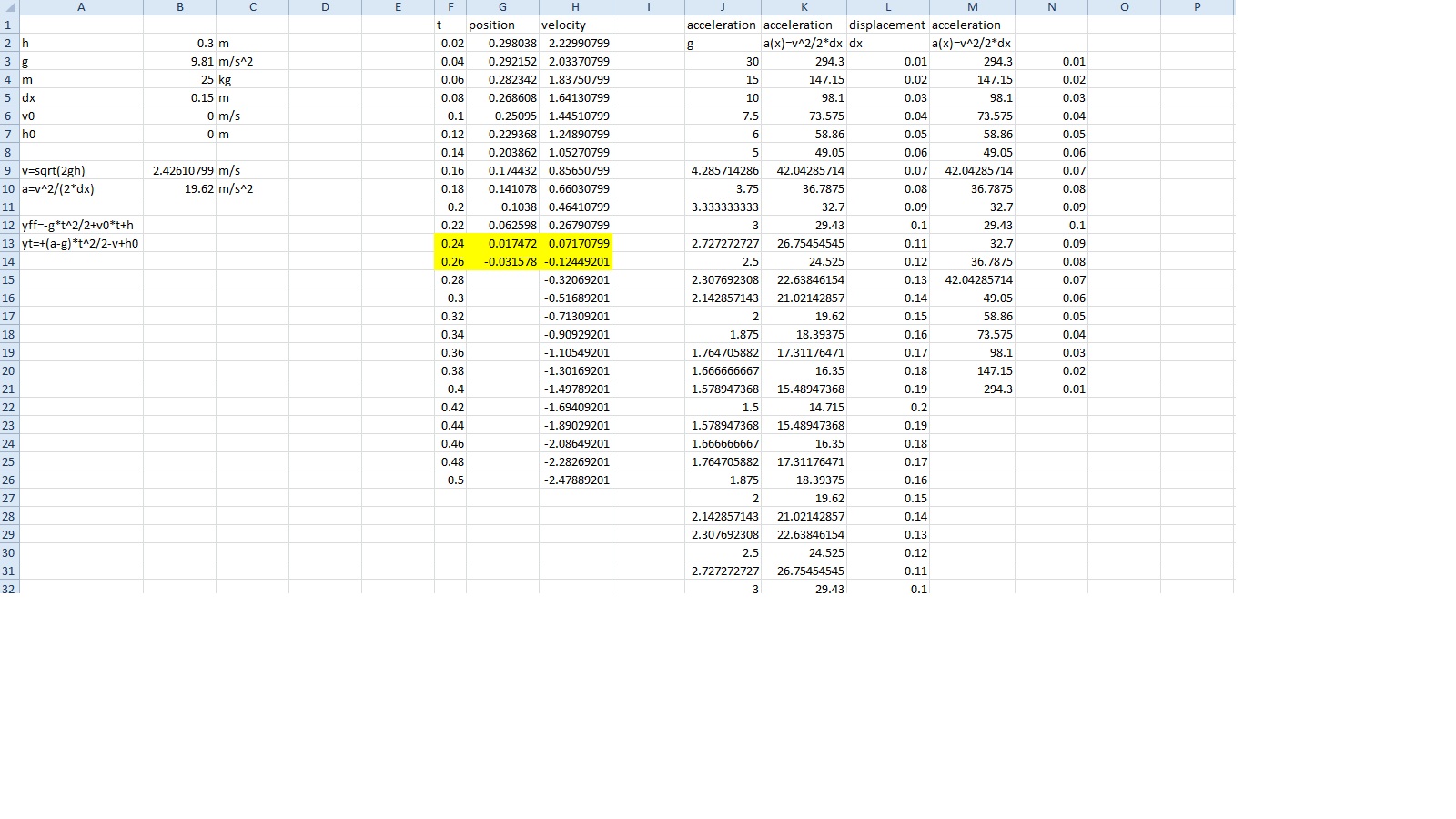
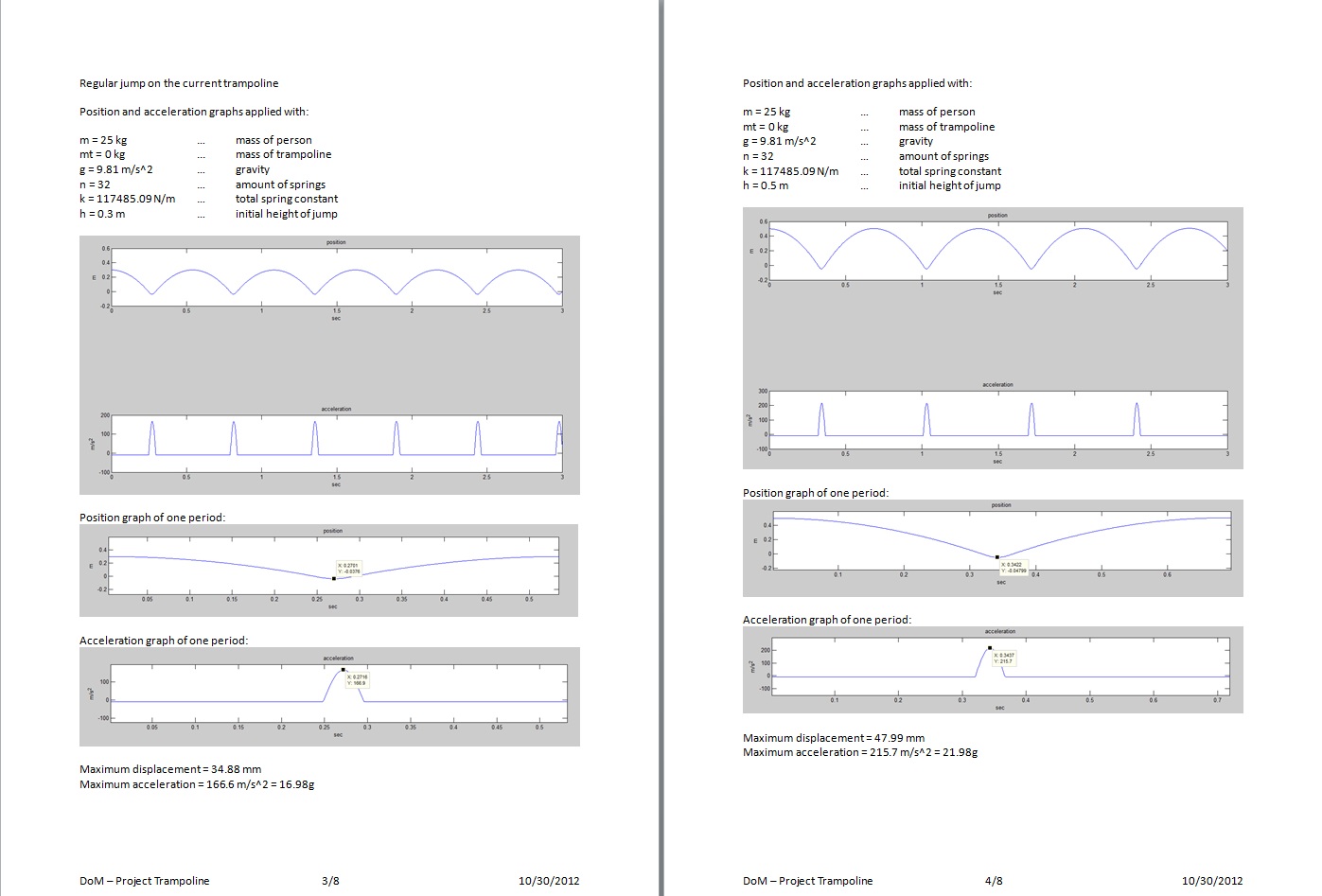
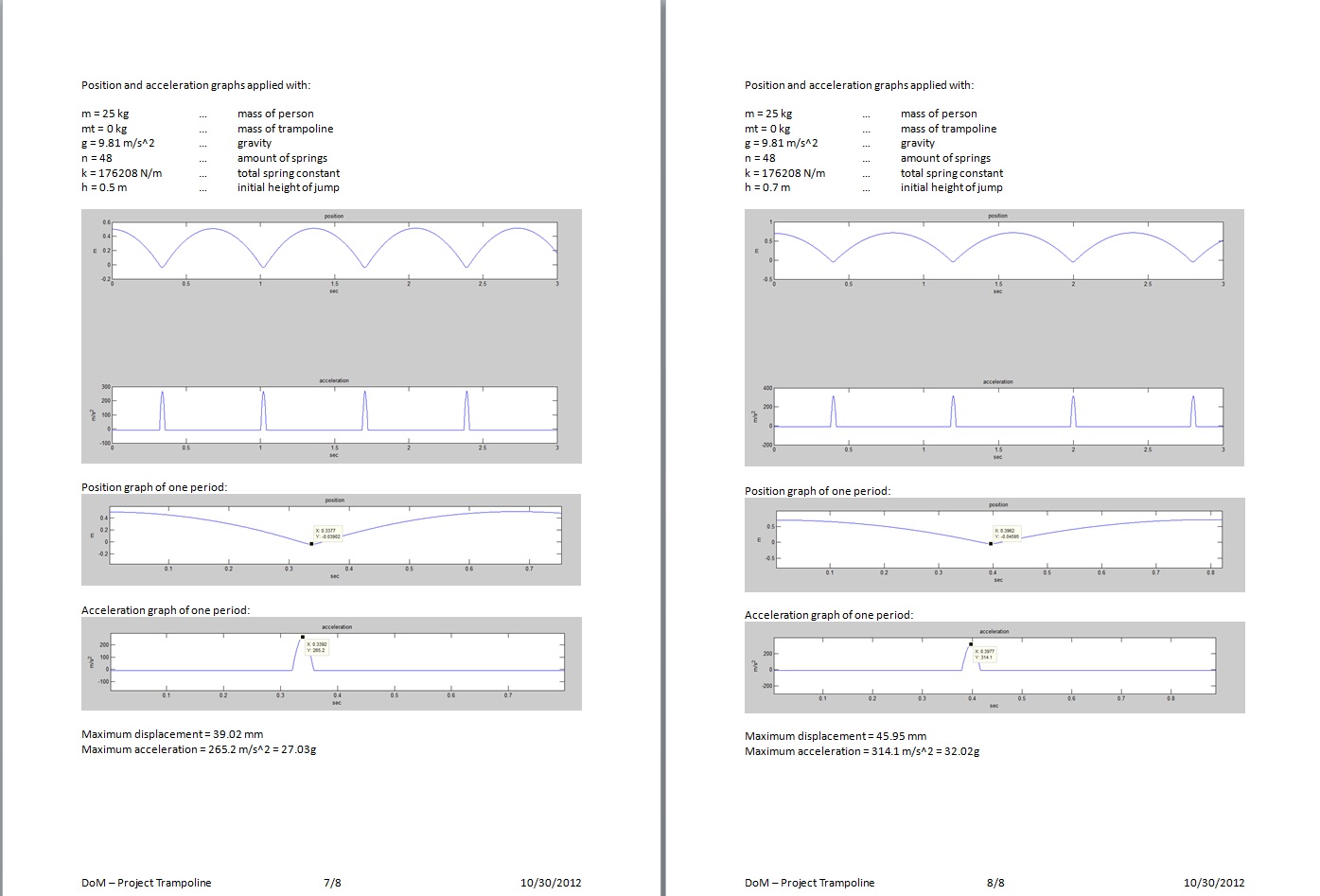
Engineering Analysis 1
A excel file used to graph the accelerating on the jump due to the trampoline springs.
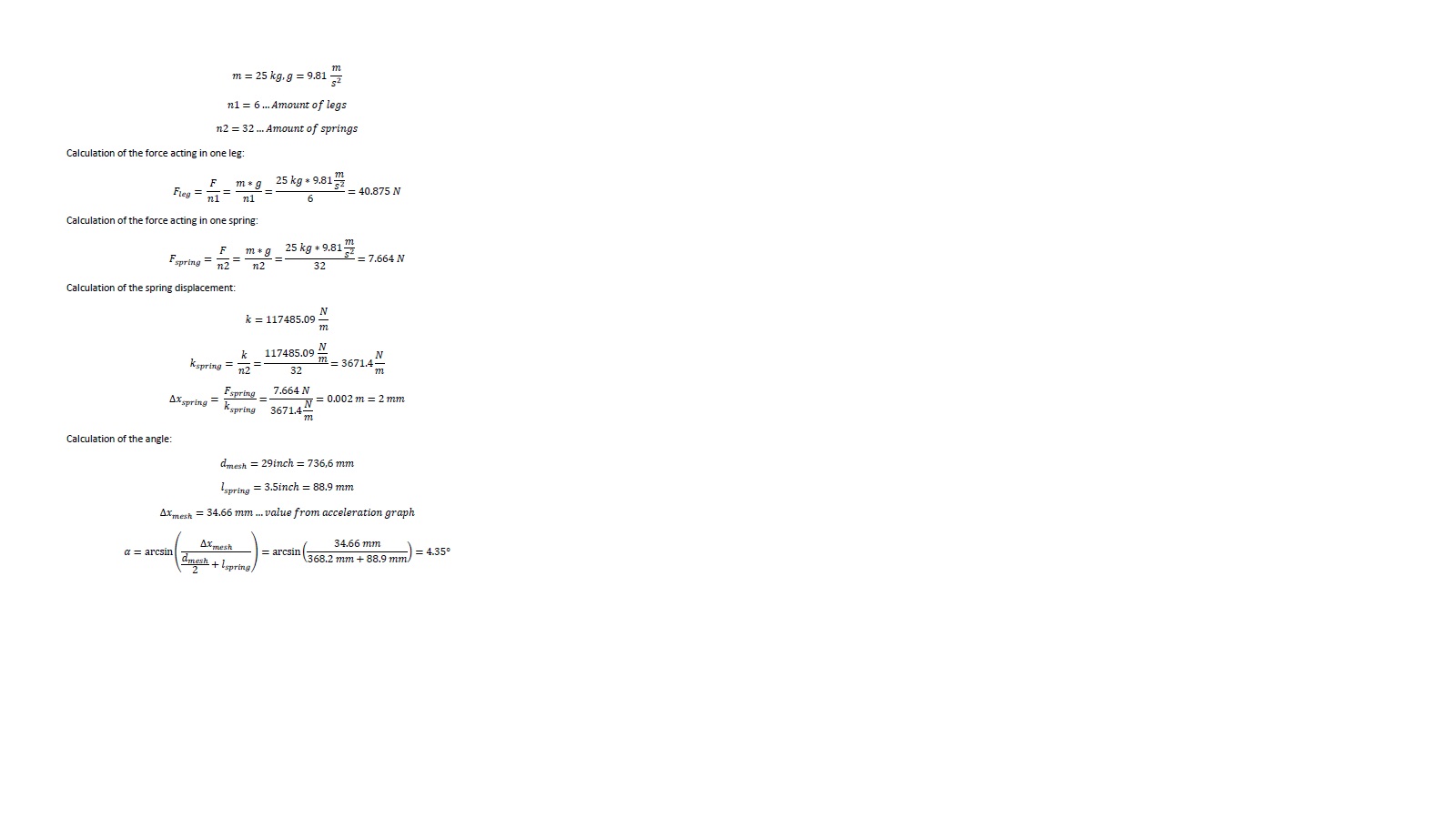
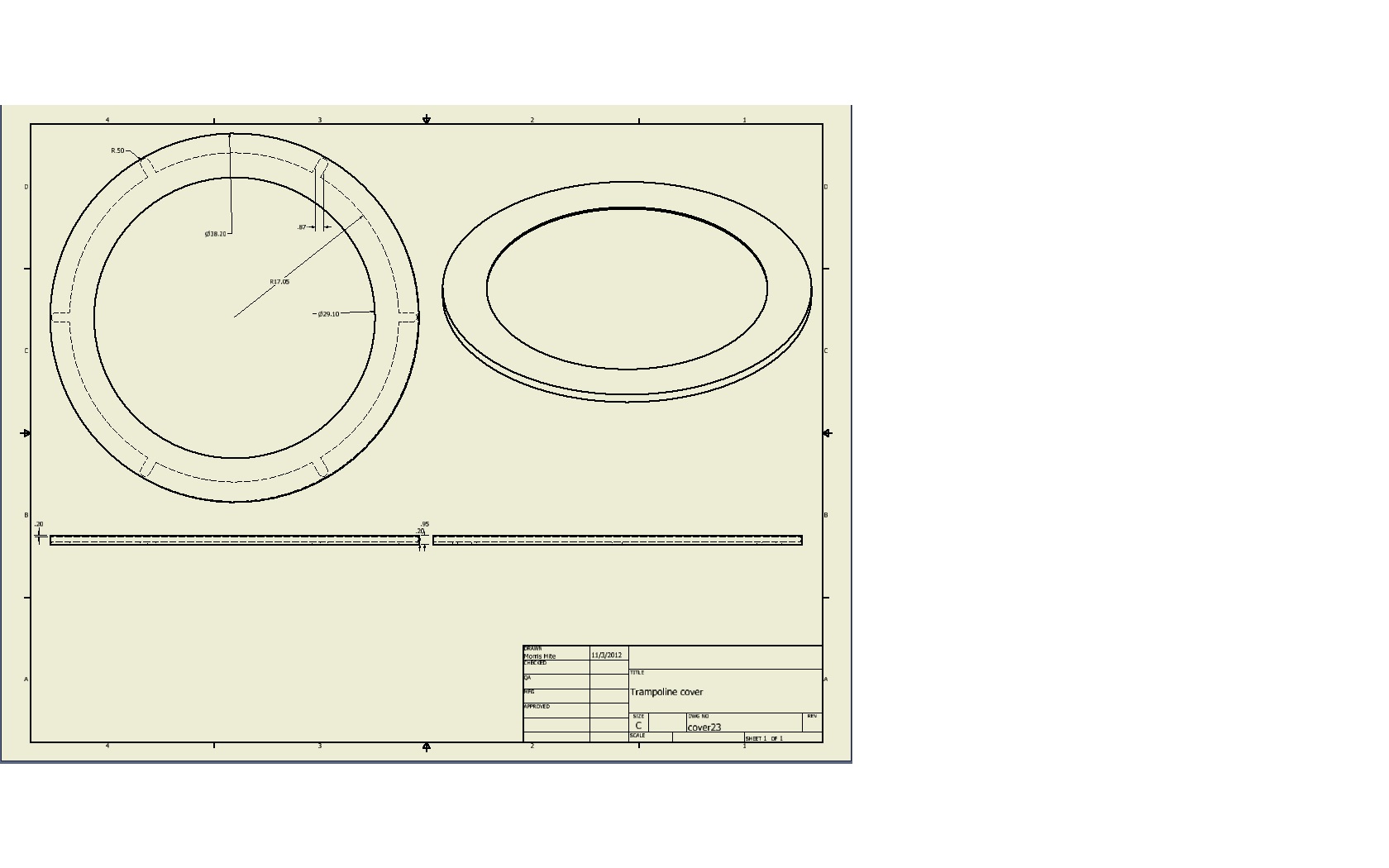
Engineering Analysis 2
Force calculation for the body of the trampoline along with forces that each spring and leg feels from use. The displacements of the springs along with their max change of angle.
Engineering Analysis 3
Matlab code used for graphing the position, velocity, and acceleration graphs.
% program trampoline clear all t = linspace(0,3,2000); g = 9.81; dt = t(2)-t(1); y(1) = .3; y_dot(1) = 0; y_ddot(1) = -g; kt = 176208; mc = 25; mt = 5; eps = .01;
for i = 2:length(t)
if y(i-1) > 0
y_ddot(i) = -g;
y_dot(i) = y_ddot(i)*dt + y_dot(i-1);
y(i) = y_dot(i)*dt + y(i-1);
flag = 0;
elseif y(i-1) < 0 && flag ==0
y_dot(i) = mc/(mc+mt)*y_dot(i-1);
y_ddot(i) = (y_dot(i) - y_dot(i-1))/dt;
y(i) = y_dot(i)*dt + y(i-1);
flag = 1;
else % y is less than zero and the momentum exchange has occured
y_ddot(i) = -g - kt/(mc+mt)*y(i-1);
y_dot(i) = y_ddot(i)*dt + y_dot(i-1);
y(i) = y_dot(i)*dt + y(i-1);
end
---
end
























{kind=link}