The purpose of our project is to put together a motorized walker that will allow the child to move around with the least amount of trouble possible. We want our motorized walker to help the child experience the daily task of walking as easy as possible.
Ethan Pesterfield, Gavin Milligan, Axsel Pelico, Jeremy Otto, Samuel Ohlsson
Problem Statement
The problem we are trying to solve for this project is building a motorized walker for a child. The Child’s name is Paul and he is currently having trouble keeping up with his classmates. He currently has a walker but one issue he is having is getting good distance with it. We are wanting to build a motorized walker to help him with this issue. The motor would be able to turn on and off so Paul can also use the walker manually. We are also wanting to add a foldable chair to the walker as well. Our team is determined to make the best walker that meets all of Paul’s needs.
Design Specifications
As stated above, we are wanting to build a motorized walker for Paul so that he can keep up with his classmates and get around easier in general. The core design specifications for said motorized walker are listed below:
Motorized
Foldable platform/seat
Able to be used as a regular walker
Safe!
Background Research
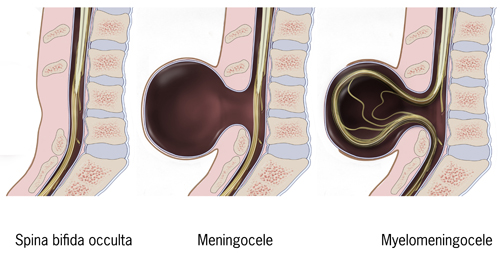
Spina Bifida is defined as “a neural tube defect — a disorder involving incomplete development of the brain, spinal cord, and/or their protective coverings — caused by the failure of the fetus’ spine to close properly during the first month of pregnancy.” Because of this condition, those that have it require some form of assistance in moving about their everyday lives. There are many different mobility assistance devices that are used depending on the person using the devices. For example, an adult with lots of physical therapy can move about with the assistance of some crutches but a toddler with very little muscle development might need a wheel chair or something motorized to assist them in their movement.
For our research to help us develop our ideas we look at the different types of walkers for adults and toddles to see if there are any differences between them. We also looked at different motor, gearboxes, and wheel packages that we could use to motorize our walker. We looked at gearboxes from Power Wheels vehicles for kids, the wheels with the motors on the inside from Onewheels, and the wheels from Hoverboards.
Concept Design 1
This design takes a traditional forward facing walker and adds the following features:
Motorized rear wheels
Foldable platform
Lockable swivel front wheels
Skid-steer like steering
Battery and electronics
Hand grip motor controllers
When in motorized mode, the user will lock the front swivel wheels in a forward facing position, fold down the foldable platform and stand on it using their knees. Then, using the hand grip motor controllers, the user will direct the walker in whatever direction they would like to go using skid-steer like steering.
When in walker mode, the user will fold up the foldable platform, and unlock the front swivel wheels so that the walker can be steered traditionally and then be on their way.
Concept Design 2
This design takes an open faced children’s walker and adds the following features:
Motorized rear wheels
Foldable rear mounted seat
Backpack-like strap harness
Battery and electronics
Skid-steer like steering
Adjustable hand grip motor controllers
Lockable swivel front wheels
To put in motorized mode the user will lock the front swivel wheels in a forward facing position, foldout the rear seat, strap themselves in, and turn the handgrips inwards. Then to steer, the user will turn the handgrips in whatever direction needed to steer using skid-steer like steering.
To put in walker mode the user will turn the handgrips outwards, undue their seat straps, and foldup the foldable seat, and unlock the front swivel wheels. After doing this the walker can be used like regular.
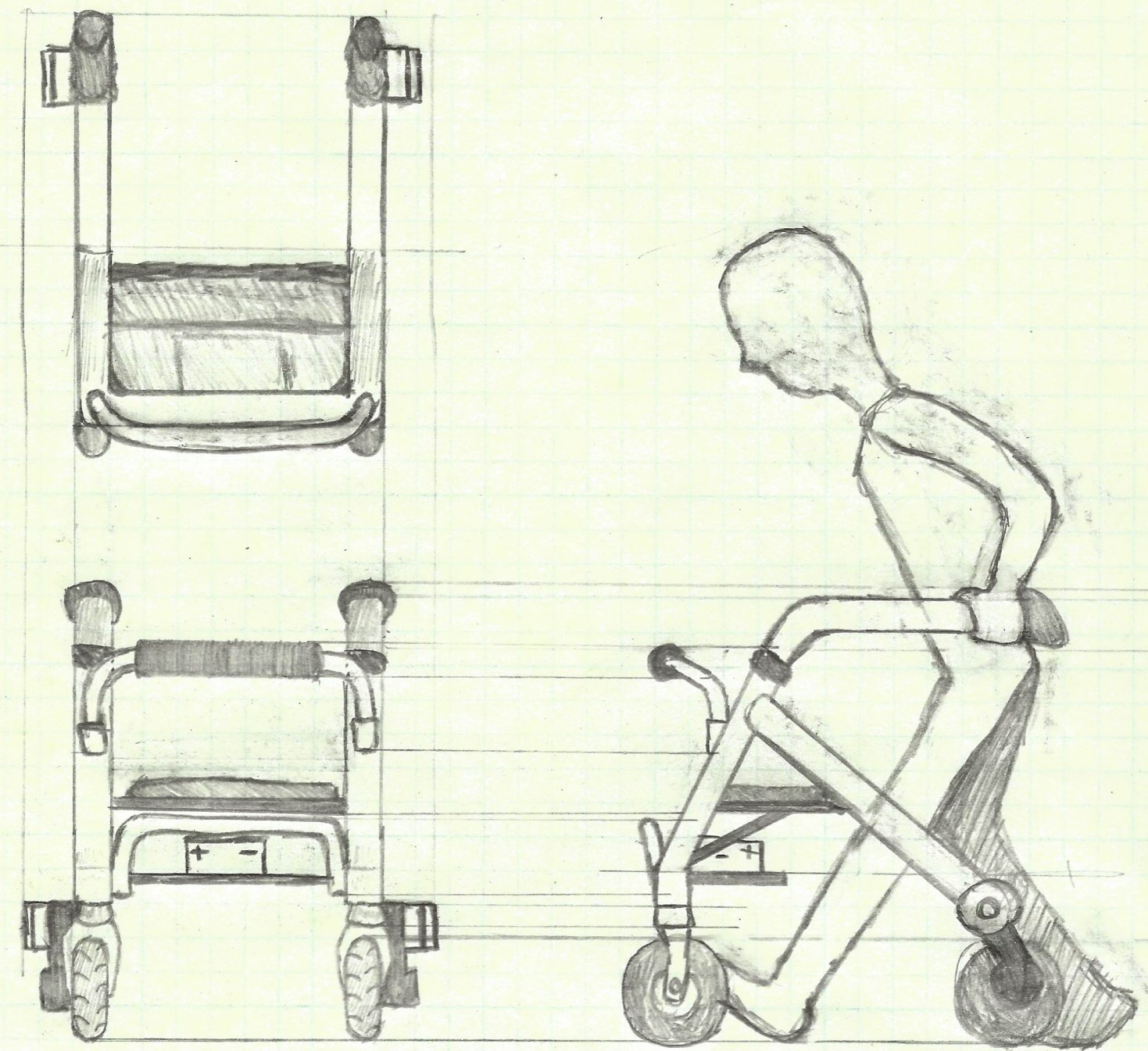
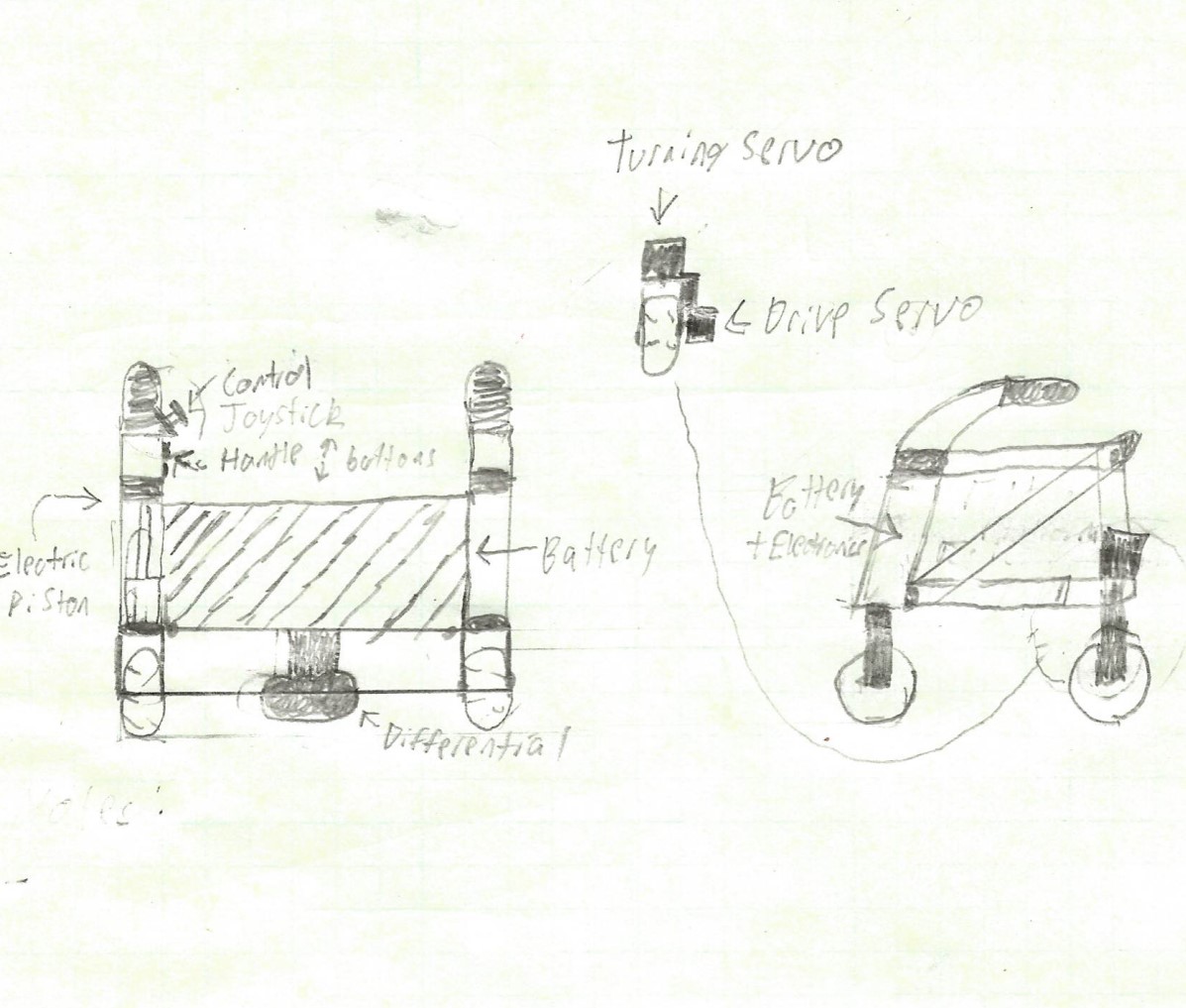
Concept Design 3
This design also iterates on a traditional forward facing children’s walker and adds the following features:
Motorized rear wheels with motorized turning capabilities
Folding platform for riding
Contained battery and electronics box
Adjustable handle height, electrically powered
Joystick thumb driving controls
To utilize the walker when motorized the electronics must be turned on, then raise the handles, and drop the platform down. All of the motion can be can controlled via the joystick while the child rides on the platform.
To utilize the walker manually all that must be done is turn off the electronics and raise the platform. The servos will allow the wheels to spin freely and act as a regular walker.
Selected Concept Design
We used a decision matrix to decide between the three concepts. The matrix consists of 5 critical design elements that we felt were most important to be satisfied in the final design. These elements were discussed in relation to each design and then scored from 1-5 (1 being least effective, 5 being most effective) based on our team’s majority opinion. The points for each design were then totaled and the highest score was deemed the most effective design.
Our critical design elements consist of: the walkers mobility, safety of user, adjustability of structure, ease of use, and supportiveness of the walker. Each of these elements must be satisfied to create the best product for our client.
With these thoughts in mind, we found design 2 to be the most effective of the three concepts because it provided reasonable to high effectiveness in all critical design elements. The design scored highest in every category except for adjustability, though we believe further iteration can address these concerns.
Decision Matrix
Overview of Selected Design
For our overall design, we decided to implement the following attributes:
Walker frame
Joystick Steering
Foldable seat
Battery/Motor
Describe Design Details
Our design details:
Walker Frame – We will purchase a pre-built walker frame to use as our base to implement our specifications.
Joystick – With the work of circuitry and coding, the joystick will allow the child to maneuver the walker to their desired direction
Foldable Seat – We will add a foldable seat that will allow the child to sit comfortably when needed.
Battery/Motor – These will be the powerhouse of our whole design. The motor and battery will provide the power and torque needed to allow the walker to provide more assistance to the child.
Engineering Analysis 1
For our first engineering analysis, we did the math to figure out how fast our wheels needed to spin and how much torque they would need in order to propel our motorized walker up an incline when being used by our client Paul.
Engineering Analysis 2
For this analysis we used Solidworks to see the maximum force the motor mount can take. For Solidworks to complete the analysis we had to assign a material, tell it where to apply the forces, and where to apply the reaction forces. We told Solidworks to apply the forces to the top of the model and the reaction forces in the axle shaft hole to simulate the child pushing down on the walker which would pass the forces all the way through the model to the ground.
Engineering Analysis 3
For the final analysis we want to get better understanding of the forces acting on our motor mount and how they may effect the motor’s performance. To complete this analysis we began by tracing the load from the child seating on the seat through the structure down to the motor and wheels that will be counteracting the force. After seeking the opinion of a structural engineer we found that the load can be modeled via the diagram shown. Finally, we ran the appropriate calculations, also shown, which yielded a reactionary force of 10.16 lb through the rear member.
We began by making our motor mounts, which involved the machining of 3 parts.
We first used a mill to square our plates and drill the necessary holes for motor attachment.
We then used a ban saw and sander to create our shaft attachment plates.
We then turned down our shafts on a metal lathe and then drilled the attachment holes on the mill.
The components were then TIG welded together to complete the parts.
We then machined our foot-pegs, consisting of 4 parts.
We began by cutting our brackets on a ban saw.
We then used a mill to drill all holes and tap the clamp holes.
Then we had the components TIG welded.
Finally, all aluminum components were sandblasted.
We also 3-D printed our battery box and joystick using PLA and PETG filaments.
Testing Results
We broke down our testing into 2 subsections, structural and electrical. Once all structural components were machined, we put them on the walker, under a 35 lbs load, to ensure sturdiness of the components and that the walker remained level. We also tested the battery and electrical systems to ensure that they were working properly.
Completed Design Photos
Instructions for Safe Use
The walker exhibits many safety features. The electronics are all contained in the battery box, which has a padlock to keep it secure. To charge or power on the walker the simply utilize the power switch or charging cable located at the back for the walker.
The child should always be accompanied by an adult when operating the walker. Before use the child should be buckled in using the 5-point harness. The foot-pegs can be moved into the upright position. Then the adult may power on the walker and the child can control the walker’s motion via the joystick. The joystick also allows for the child to grip it with their full hand creating greater control.
Project Summary/Reflection
We are very grateful to have inherited this project because it allowed us to take it further than would have been possible starting with nothing. We are extremely happy with how we were able to advance this project. We would like to thank Dr. Stephen Canfield, Dr. William Brookshear, Mr. Eric James P.E., and Mr. Jeff Randolph for their guidance throughout our project.







































{kind=link}