Fall 2022 Project 10: Adaptive Computer Station/Gaming Station
Abstract
The goal of this project is to assist a person with Duchenne Muscular Dystrophy with the task of using an input device to play Xbox. The dilemma is that the use of a standard Xbox controller is not practical or comfortable given the range of motion in the hands. The adaptive systems commonly seen do not work well for this individual. We will be designing and manufacturing a system that will be comfortable and practical for him to use.
Asa Greenwell, Connor Lowe, Ryan Medlin, Zach Wisti, Anthony Wonder (not pictured)
Problem Statement
Individual with Duchenne Muscular Dystrophy enjoys playing Xbox video games yet has limited dexterity. The family’s current (makeshift) solution is adaptive buttons loosely taped to a pillow. The individual can only game for very little length of time without their hands/fingers slipping off the controller and/or buttons.
Design Specifications
The family would like a more permanent setup that will allow the individual to reliably access the necessary inputs for a wide range of video games, and that is compatible with their existing Xbox controller hub (more info on this hub in the Background Research section).
Background Research
Xbox currently has an Adaptive controller that serves as a “unified hub” for typical controller inputs. Combined with Logitech G’s Adaptive Gaming Kit, a user can play video games uninterrupted as with a standard controller and its respective inputs.
The family already has both of these devices, but needs an ergonomic solution that will allow the individual to reliably access the necessary inputs for specific video games.
Concept Design 1
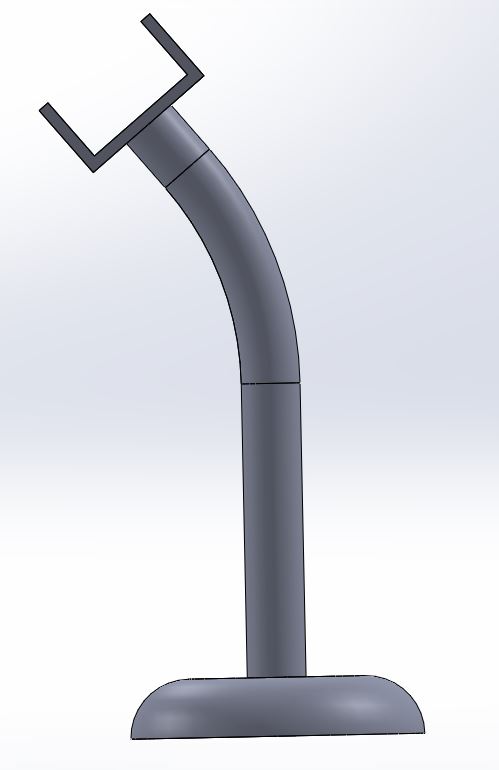
This concept design is specifically designed for the purpose of using the Xbox controller itself. It consists of a mount to attach to a wheelchair tabletop, a stiff flexible tube for maximum adjustment, and a spring loaded clip to hold the Xbox controller. This design is intended to strictly use the Xbox controller and have adjustable placement for the comfort of the user.
Concept Design 2
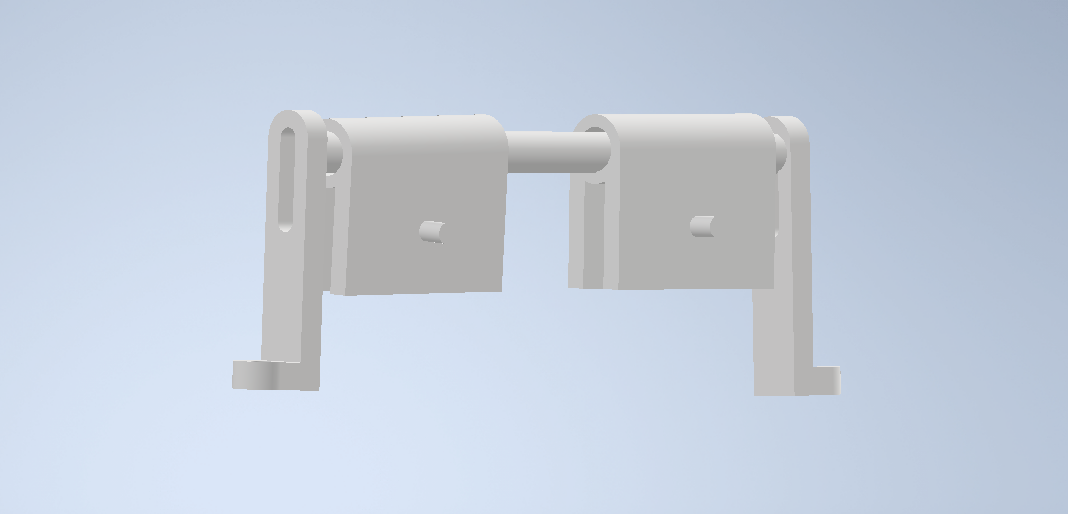
This concept design is designed to be attached to the top of the wheelchair’s table.
There are two vertical supports which will be able to slide forwards and backwards on the table top. The supports will be connected by a horizontal rod that can be adjusted up and down. There are two ergonomic handles along the rod. The handles will be able to slide and rotate about the rod. The handles each have two vertical plates attached to the bottom. The back plate will have a joystick. The front plate will have two buttons.
These inputs will be plugged into an adapter for the controller.
Concept Design 3
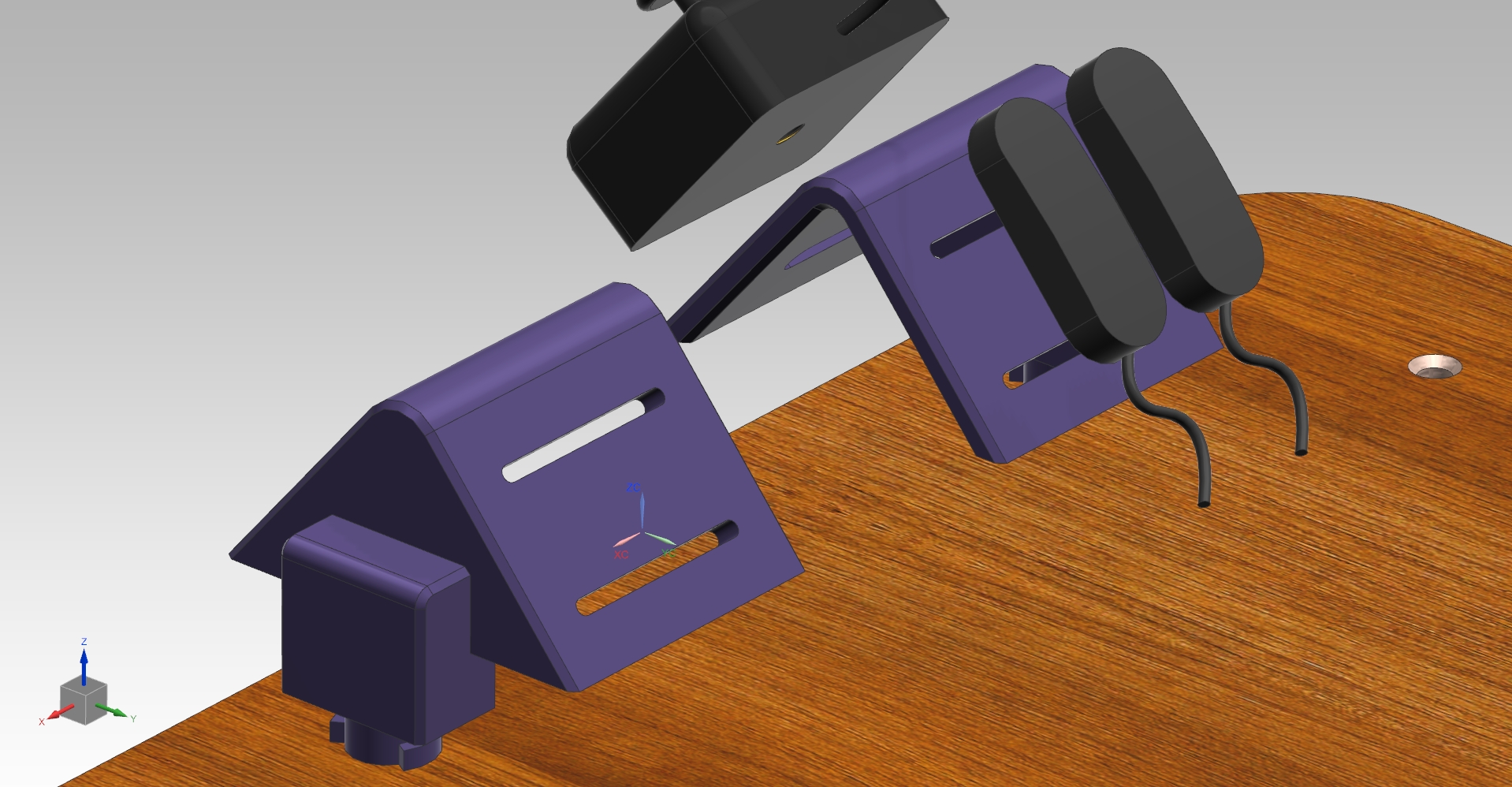
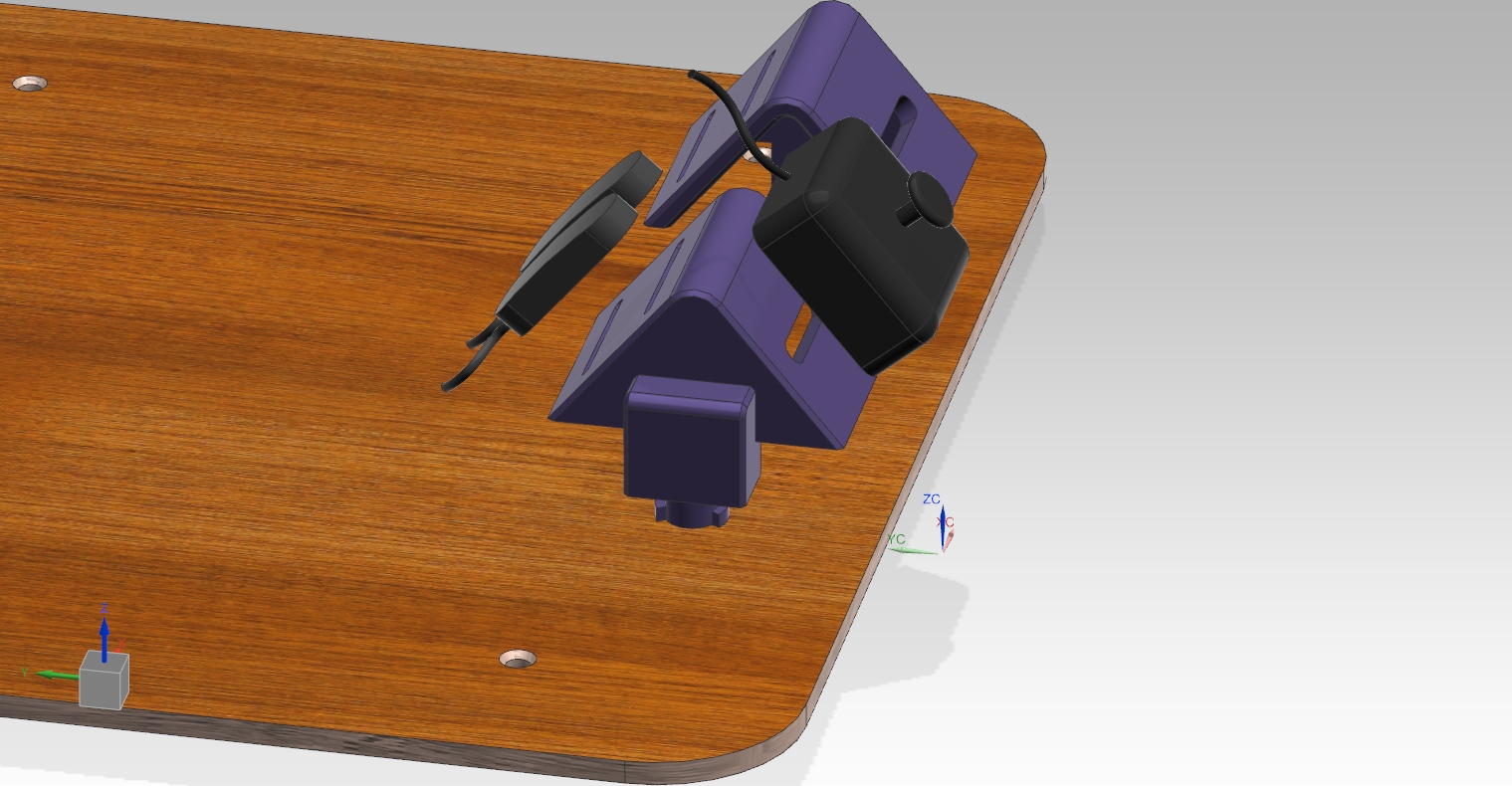
This design takes a modular approach with no moving parts.
Modularity is maintained since all components are removable (functions like a camera tripod quick-release) and adjustable as needed. The blocks passively lock into cutouts (not shown) in the platform by rotating into place. The complete removal of the block is necessary because this platform is not solely for the individual’s gaming station, but rather a platform for all daily activities and purposes.
Slots in the 3D-printed block (purple) are used to mount the Logitech G Adaptive Gaming Kit buttons and joystick using the built-in threaded insert, and can be moved laterally for user comfortability.
Selected Concept Design
All three above designs are feasible, with Concept 1’s purpose is solely to hold the controller.
Concepts 2 & 3 purpose is to come up with an adjustable setup to mount the Logitech buttons.
Decision Matrix
Overview of Selected Design
The best features of design concepts 2 & 3 were retained, allowing for maximum adjustability, ergonomic comfort, and modularity.
Describe Design Details
Two 3D-printed plates that have a hole and a positive notch will slide onto a keyed shaft that is supported by telescoping sleeves on each end. These plates can independently slide laterally to fit the user’s needs.
At the top of the right sleeve is a 12-pt socket style cutout that will allow for angular adjustment, and a circular cutout that allows for a C-clip to retain the shaft is on the left sleeve. Each sleeve has (for now) 3 adjustment levels, and the base leg inside of each sleeve has the ability to translate towards and away (not shown yet) the user. This translation is achieved by a slot cutouts on the acrylic platform.
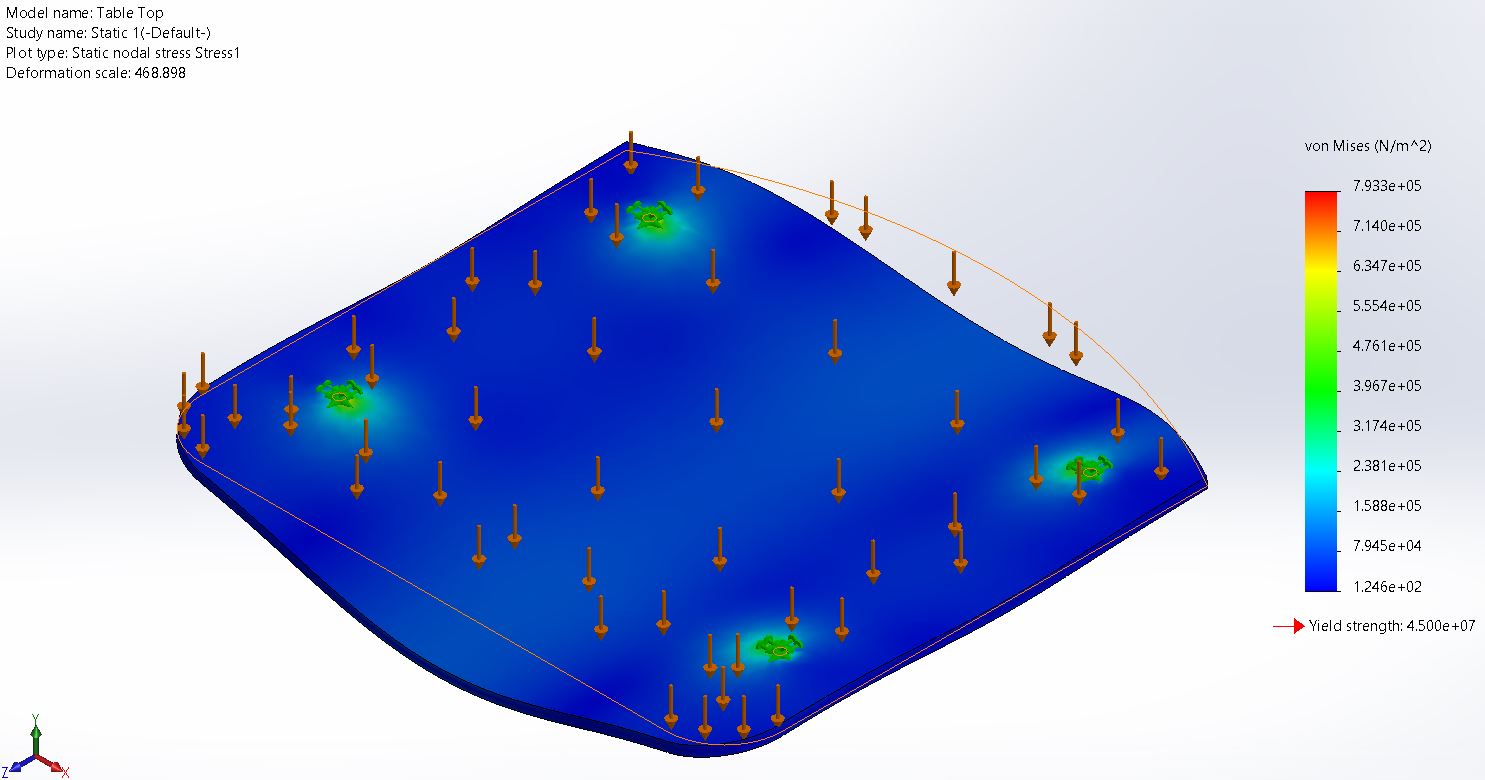
Engineering Analysis 1
For this first analysis, a stress test in SolidWorks was done to test the yield stress of the table top when the Polycarbonate material was applied. This Polycarbonate material is flexible and does not create a lot of stress in the material itself when disformed. Even given this information, it will take a lot of force to deform this 1/4″ polycarbonate table top. This data shows us that the design for our new table top will work for the application we are using it for. Since we are making a removable controller system for this table top, it will also be used for other everyday uses for this individual. This data shows that the tabletop will withstand the everyday uses and stresses.
Engineering Analysis 2
For this second analysis, the keyed bar that will be used for the cross section of the controller set up was put through a stress test. This carbon steel bar has an insanely high yield strength. The application we are using this bar for will not come close to these yield strength numbers. This bar is holding the controller sliders and plates along with the weight of his hands. This adds a very small force on this bar which again will not deform the bar or come close to deforming this bar. It will withstand a lot of downward force that could possibly be placed on this keyed bar. This stress test was also done by applying the force to the weakest part on the model (The Keyed Slot) to give us the best results.
Engineering Analysis 3
The average human hand weighs 0.575% of the total body weight. Assuming the individual weighs 140 lbs, his hands would weigh approximately 0.805 lbs. We can use this to find maximum deflection on the bar.
Welding: leg to base plate, bar slots to leg sleeves, serrated plate to bar, hand plates to handles
Additive Manufacturing: Leg caps, bolt knobs
Powder Coating: legs, hand plates
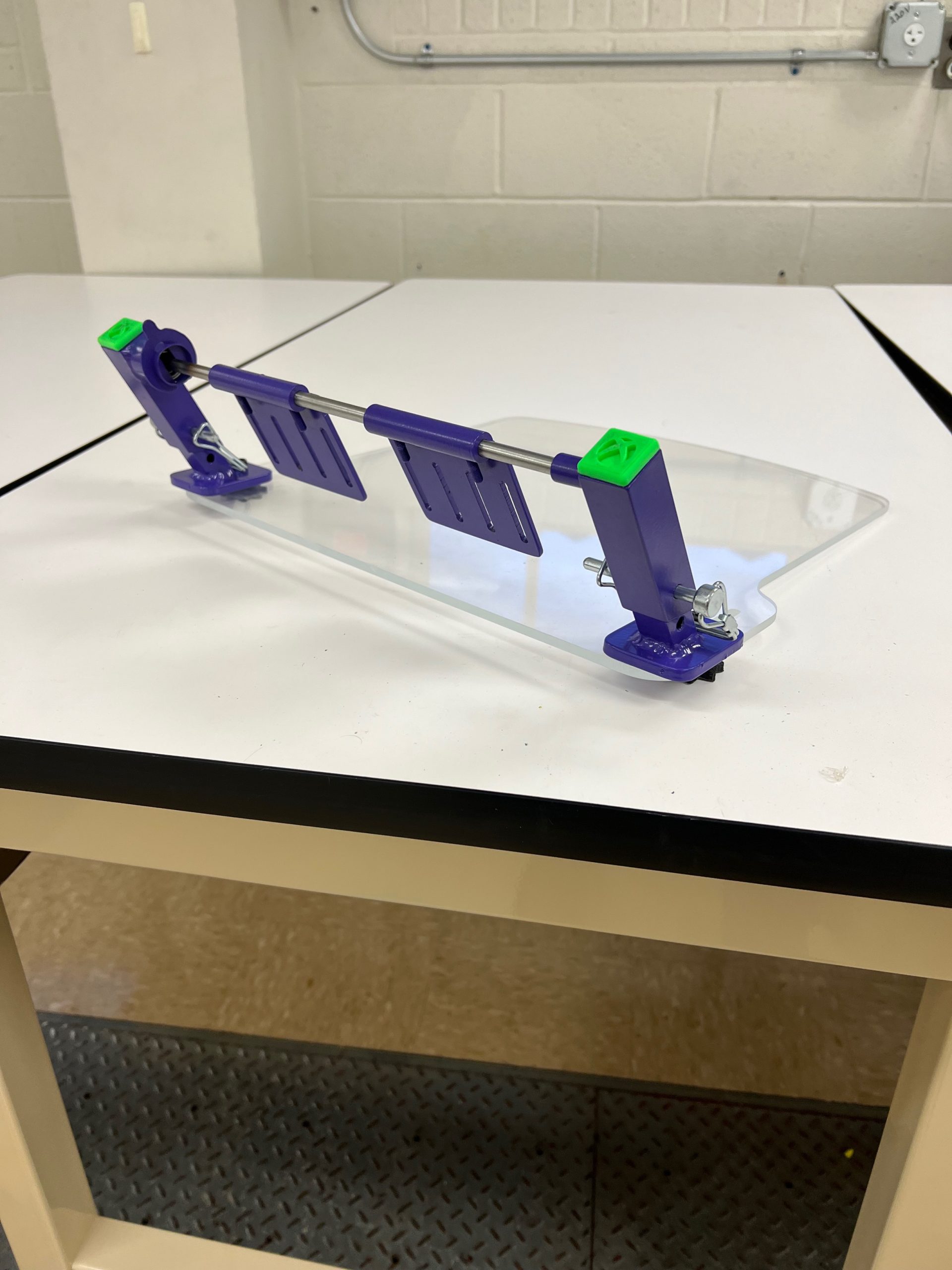
Completed Design Photos
Instructions for Safe Use
Ensure that the leg bases are securely screwed into the table.
Make sure the adjustment pins are fully through both the leg and the leg sleeve, and then the retainer clip is fully around the end of the pin.
The c-clip must be pushed into the slot all the way.
To adjust the angle of the hand plates: grasp the horizontal steel shaft and slide it to the left (some force may be required; it’s under tension) and set to desired angle, release the shaft and the spring tension will hold it in place.
Project Summary/Reflection
Click here for a YouTube video showing functionality.
We thank Jeff Randolph, Chris Mills, Dr. Stephen Canfield, and the Department of Mechanical Engineering for their support on this project and the entire EIME program.























{kind=link}